
Om een idee te geven van hoe interessant en leuk het werken in projectgroepen kan zijn, volgt hier wat informatie over de op dit moment niet meer actieve groep TetraBot, waarin intensief werd samengewerkt met mensen uit de HCC!Robotica interessegroep. Het doel was om uit te vinden of we een soort "Fractale Boom" kunnen laten lopen. Het idee is als volgt.
Vanuit een centraal punt lopen 4 takken uit elkaar, met onderlinge hoeken van 109.47°. Elk van deze takken vertakt zich ook weer in drieën, onder hoeken van dezelfde grootte; en daarna nogmaals. Zo ontstaat een boomstructuur met 4×3×3 = 36 eindpunten. Een draadmodel van deze constructie is te zien op de volgende foto.
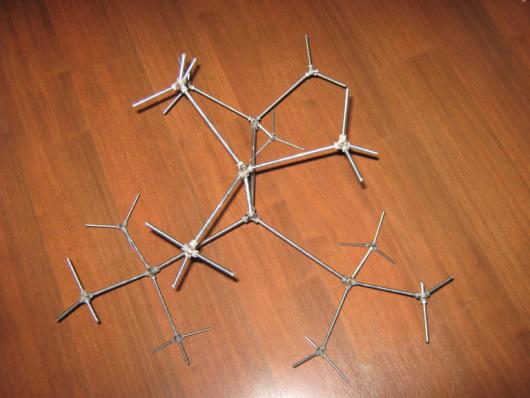
Maak vervolgens alle vertakkingen draaibaar, waarbij de tak waaraan ze ontspringen als as fungeert. (Draaibaarheid in het centrale punt voegt geen bewegingsmogelijkheden toe, en kan dus achterwege worden gelaten.) De resulterende bewegende constructie hebben we TetraBot genoemd: "Tetra" (= "vier") omdat op elk knooppunt 4 takken samenkomen, en "Bot" (van "Robot") natuurlijk omdat het beweegt.
Als we nu alles laten draaien, zullen de uiteinden waarmee TetraBot op de grond rust, waarschijnlijk langs het vloeroppervlak gaan glijden (mits de motoren sterk genoeg zijn om de wrijving te overwinnen, natuurlijk), omdat de onderlinge afstanden van deze steunpunten zullen veranderen. Verder zullen sommige steunpunten van de grond weggedraaid worden, terwijl bij voortgaande draaiing andere uiteinden juist de grond zullen gaan raken en dus als nieuwe steunpunten dienst gaan doen. Bij al deze bewegingen zal het apparaat zich mogelijk enigzins verplaatsen, maar zolang de draaiingen ongecoördineerd zijn zal dit zeer inefficiënt zijn en meer een soort van voortkrabbelen dan echt lopen.
De vraag is nu: kunnen we de draaiingen zo coördineren, dat TetraBot echt gaat lopen; d.w.z. dat de steunpunten niet langs de vloer glijden (in ons jargon: er treedt geen "slip" op), maar er een verplaatsing ontstaat die uitsluitend berust op het voortdurend wisselen van steunpunten? Het idee lijkt een beetje op de whegs™,, maar is ingewikkelder wegens de 3-zijdige symmetrie, de niet-loodrechte hoeken, en de extra "gewrichten".
Ondanks dat er nog geen loop-algoritme is gevonden, zijn de robotici toch alvast begonnen met het daadwerkelijk bouwen van een TetraBot. De volgende foto's geven een idee van de huidige stand van zaken, het vakmanschap dat in de software en de hardware wordt gestopt, en het plezier dat de deelnemers aan dit project beleven.
Een (statisch, maar grafisch mooi) plaatje van een TetraBot, gemaakt door Titus met POV-Ray.
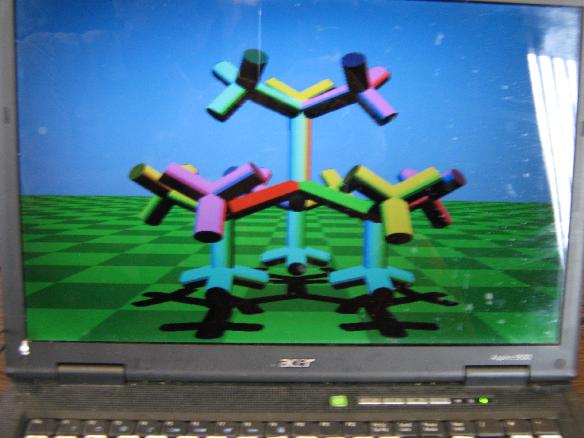
Een schermprintje van het simulatieprogramma van Titus, waarin de gebruiker m.b.v. het toetsenbord elke motor in elke gewenste richting kan laten draaien.

Leden van de HCC!AI interessegroep, vol belangstelling voor de constructie zoals die er momenteel voor staat.

Een wat dichterbij genomen kiekje, waarop het "been" beter te zien is.
GV 03-04-2011
Terug naar AIgg thuispagina
